FOAM TO WOOD VENEER VIA ABB IRB 6620 ROBOT

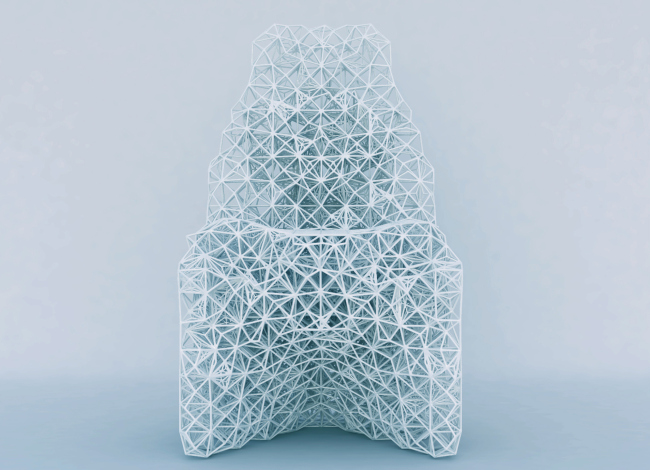
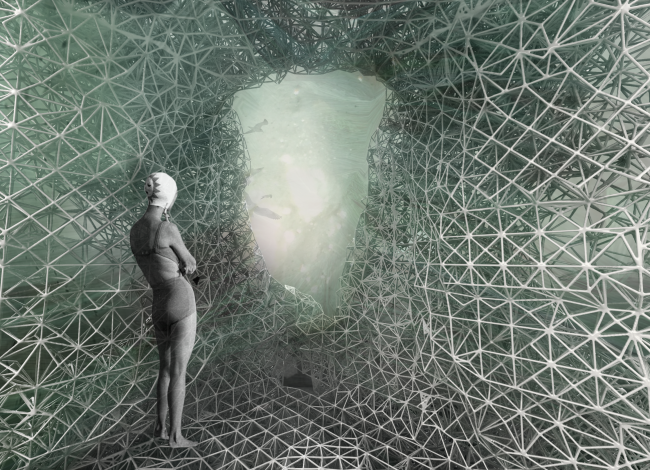
This workshop was a collaboration with the Chinese school Harbin Institute of Technology. Us, the Aarhus students, shared our robotics and manufacturing knowledge with our visitors. The pipeline consisted of an inspirational word (in our case, “slip”) translated to a free form shape within the set boundaries for a small column (300x300x2300 mm). This shape was then to be re-modeled into singularly curved surfaces, in order to enable for robotic hot wire foam cutting.
We (me in a group with Liam Marosy-Weide and Wenxuan Cheng) went ahead and set up the large, full-scale ABB IRB 6620 robot to cut our 4 pieces. This by taking our 4 surfaces through Grasshopper in order to convert the coordinates to RAPID code. This is not a language which I can write - but I can by the help of Grasshopper and the files which our lab responsibles have set up, convert my models in order to hot wire cut, cnc mill or print them with an ABB robot. We assembled our 4 foam pieces and covered them to a physical column with 3D wooden veneer and a special wood glue. The last action in the pipeline which we executed was vacuum forming on a large bed. After 24 hours, the columns were ready to be exhibited in the Aarhus School of Architecture exhibition hall!
We (me in a group with Liam Marosy-Weide and Wenxuan Cheng) went ahead and set up the large, full-scale ABB IRB 6620 robot to cut our 4 pieces. This by taking our 4 surfaces through Grasshopper in order to convert the coordinates to RAPID code. This is not a language which I can write - but I can by the help of Grasshopper and the files which our lab responsibles have set up, convert my models in order to hot wire cut, cnc mill or print them with an ABB robot. We assembled our 4 foam pieces and covered them to a physical column with 3D wooden veneer and a special wood glue. The last action in the pipeline which we executed was vacuum forming on a large bed. After 24 hours, the columns were ready to be exhibited in the Aarhus School of Architecture exhibition hall!
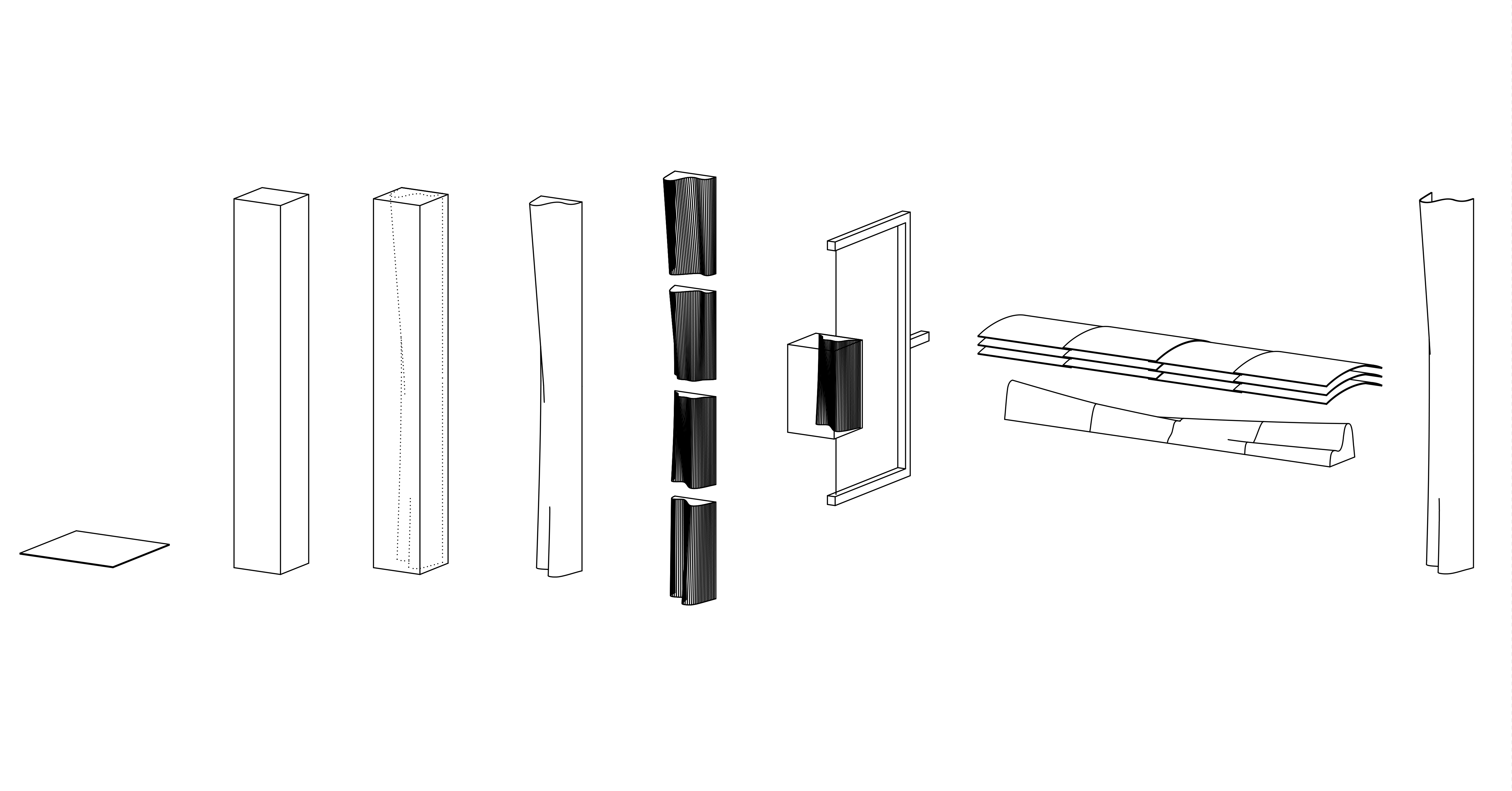
1. Sheets of 3D wooden veneer, 600x600x2 mm.
2. Size restriction of column, 300x300x2300mm.
3. Our design fit into the restrictions.
4. Our design, the “slip”.
5. We divided our design into 4 pieces and lofted for ruled surfaces.
6. The hot wire cutter in action, the hot thread folowwing the divisions of the ruled surface.
7. We assembled out 4 pieces of foam, layered on the veneer and the glue. Finger joints.
8. The result, wooden column being able to stand by itself.
2. Size restriction of column, 300x300x2300mm.
3. Our design fit into the restrictions.
4. Our design, the “slip”.
5. We divided our design into 4 pieces and lofted for ruled surfaces.
6. The hot wire cutter in action, the hot thread folowwing the divisions of the ruled surface.
7. We assembled out 4 pieces of foam, layered on the veneer and the glue. Finger joints.
8. The result, wooden column being able to stand by itself.